AI(人工知能)開発実績
-

マルチiPhoneモーションキャプチャ
-
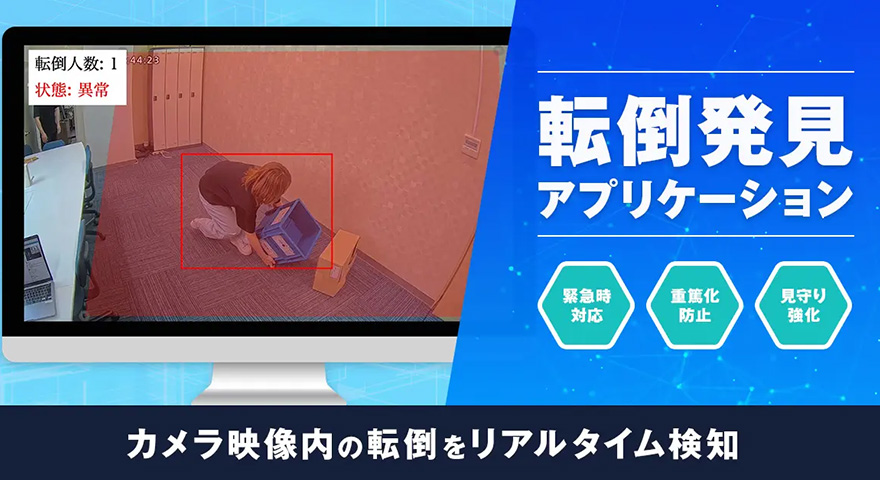
転倒発見アプリケーション
-
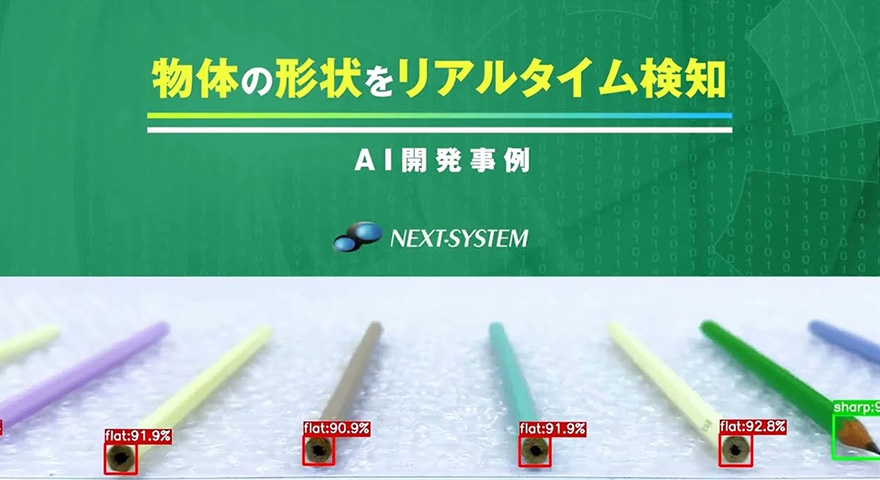
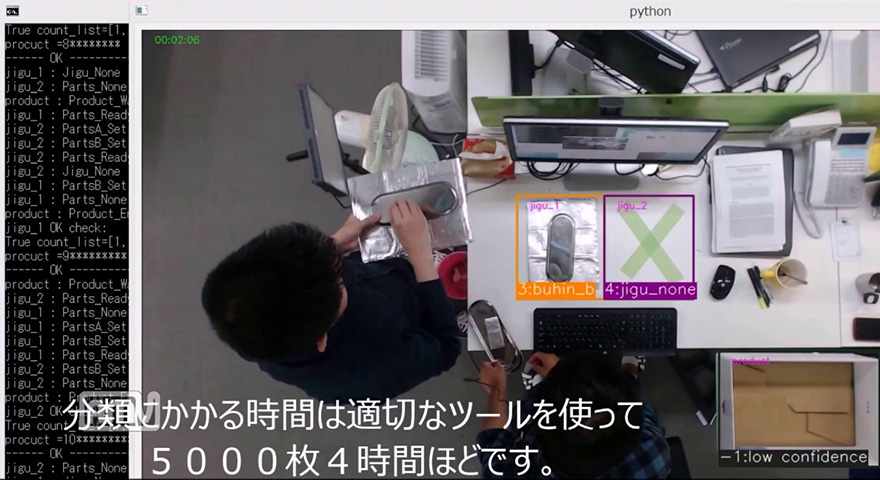
物体検知AIによる品質管理と検品業務のDX化
-
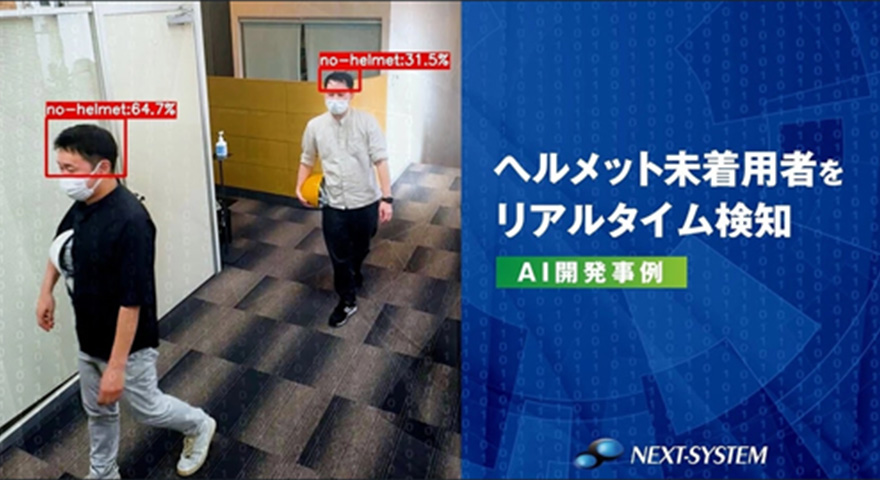
ヘルメットの未着用検知で労働災害を防止
-

独自の立体文字認識技術で非平面上の文字認識がスマホをかざすだけで可能
-

定点カメラでとらえた映像をCGで再現、忘れ物や不審物の発見などに活用
-
VAEによる異常検知とデータの区切り技術で、品質管理の業務効率化とコストダウンを実現
-
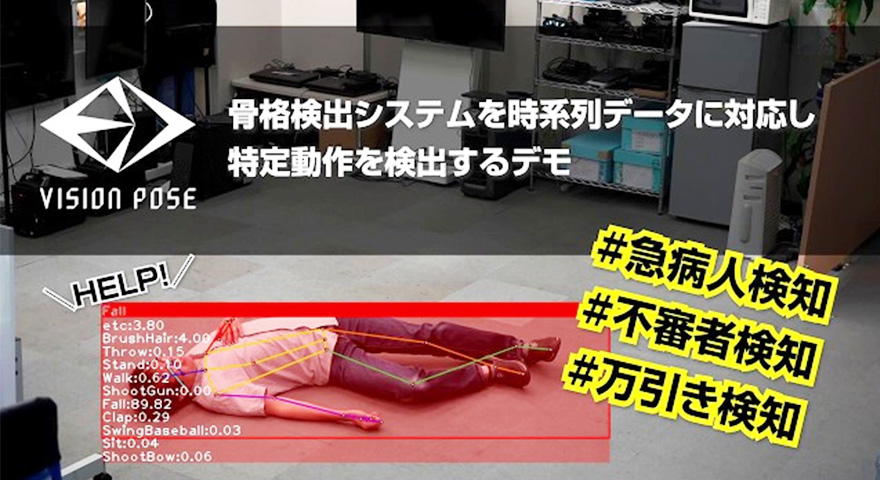
VisionPoseの姿勢推定と時系列分析で行動認識予測
-

顔認識AI+人物追跡システム
-

交通量可視化システム
-

CGによる教師データ作成ツールの開発で学習を効率化
-
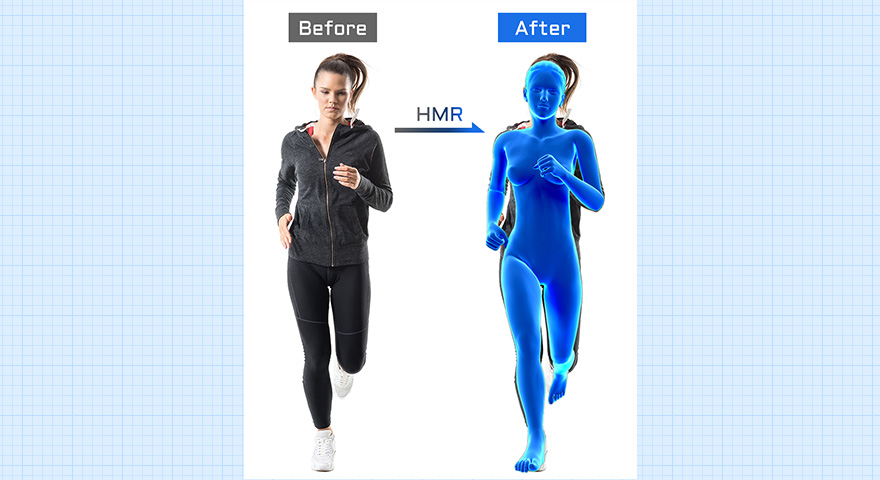
敵対的学習を用いて、Human Mesh Recovery(HMR)から体型・体重を検出
-
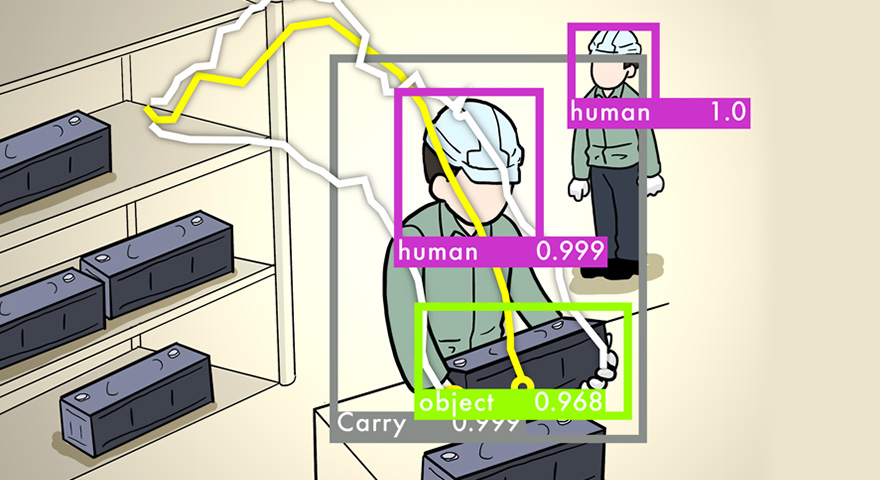
部品の落下、衝撃、軌道を検知するシステム
-
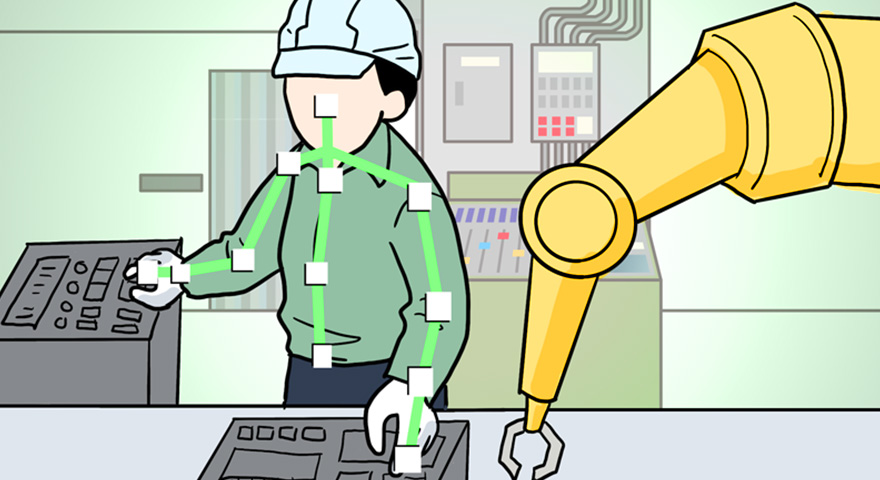
単純作業のミスを検知!ロボット連携定型作業
-

工場での人為的なミスを減らして品質向上する商品検査システム
-

ユーザーが身につけたものに最適な服を提案するAI(人工知能)変身システム
-
単調作業に置ける人為的ミスの削減に。人の定型作業を見える化するシステム
-

ディープラーニングを使用して在庫管理・物流管理に役立てる
-

ディープラーニング用の教師データ作成方法(手に持った物体の学習)
-

VRで作業負荷の見える化「VR-Ergono」
-

骨格情報から作業員の体にかかる負荷を可視化したVRシミュレーターシステム
-

運動機能向上アプリ「ロコチャレ」
-

ゲーム感覚で運動できる健康体操アプリ
-

身近な場所がどこでも癒しの水族館になる「アクアリウムAR」
-

AI×ARの非接触型デジタルサイネージ Kinesys
-

仮想試着システム Virtual Fashion
お気軽にご相談ください
お問い合わせ